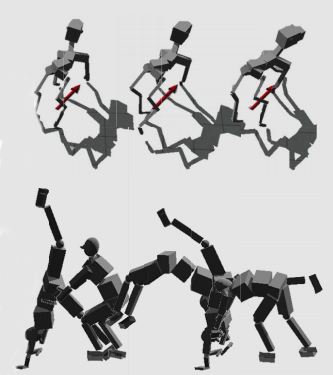
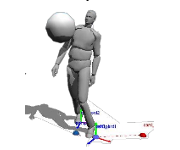
| Taesoo Kwon, Taehong Gu, Jaewon Ahn, and Yoonsang Lee, Adaptive Tracking of a Single-Rigid-Body Character in Various Environments, In proc. ACM SIGGRAPH ASIA 2023 (accepted).
| ||
 |
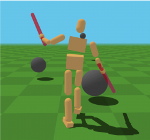
Jeongmin Lee, Taesoo Kwon, and Yoonsang Lee, Interactive Character Path-Following Using Long-Horizon Motion Matching With Revised Future Queries, IEEE Access, Volume 11, 9942-9956, January 2023.
| |
 |
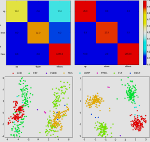
Junyoung Yun, Hyeongil Nam, Taesoo Kwon, Hyungmin Kim, and Jong-Il Park, Real-time Bi-directional Real-Virtual Interaction Framework Using Automatic Simulation Model Generation, Proceedings of the 30th IEEE Conference on Virtual Reality and 3D User Interfaces (IEEE VR'23). | |
 |
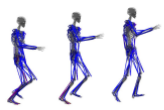
Jaepyung Hwang,Gangrae Park,Taesoo Kwon,Shin Ishii, Transition Motion Synthesis for Object Interaction based on Learning Transition Strategies, Computer Graphics Forum, 2022 (accepted) | |
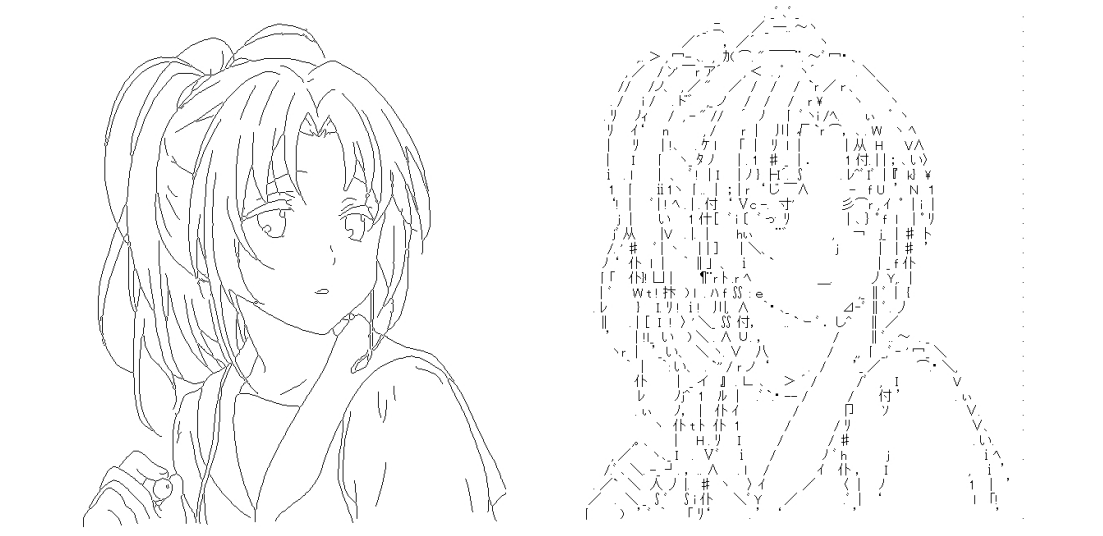 |
Moonjun Chung, Taesoo Kwon, Fast Text Placement Scheme for ASCII Art Synthesis, IEEE ACCESS, 2022 (accepted) | |
 |
Jongmin Kim, Yeongho Seol, Taesoo Kwon, Interactive multi-character motion retargeting, Comput Anim Virtual Worlds. Volume32, Issue3-4, 2021 | |
 |
Jaepyung Hwang, Shin Ishii, Taesoo Kwon, and Shigeyuki Oba, Modularized Predictive Coding-Based Online Motion Synthesis Combining Environmental Constraints and Motion-Capture Data, IEEE Access, vol. 8, pp. 202274-202285, 2020 | |
 |
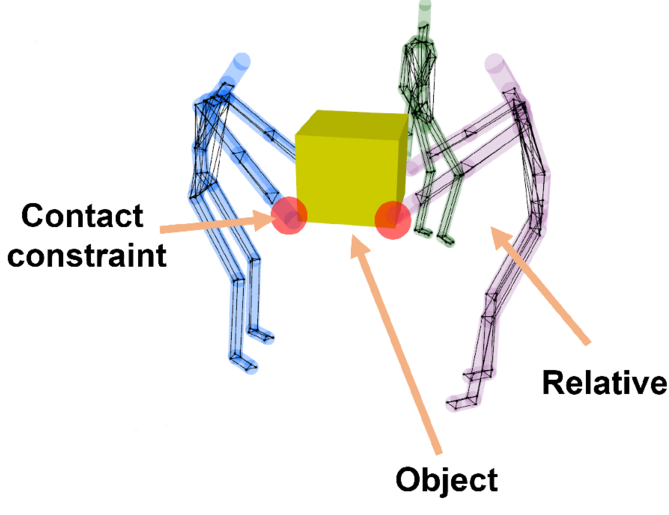
Jae-Pyung Hwang, Gangrae Park, Il Hong Suh, and Taesoo Kwon, Primitive Object Grasping for Finger Motion Synthesis, Computer Graphics Forum, Volume 40(2021), Number 1. | |
 |
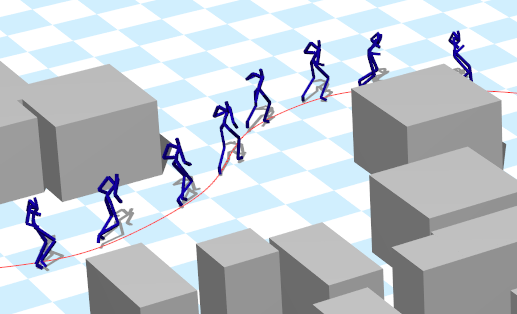
Taesoo Kwon, Yoonsang Lee, and Michiel Van de Panne, Fast and Flexible Multilegged Locomotion Using Learned Centroidal dynamics, ACM Transactions on Graphics (ACM SIGGRAPH 2020), Volume 39, Issue 4, pp 46:1–46:1.
| |
 |
Jongmin Kim, Yeongho Seol, Hoemin Kim, and Taesoo Kwon,
Interactive Character Posing with Efficient Collision Handling, Comput Anim Virtual Worlds. 2020;e1923. https://doi.org/10.1002/cav.1923 | |
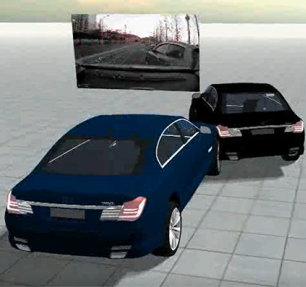 |
Daeun Kang, Jinuk Jeong, Seung-wook Ko, Taesoo Kwon and Yejin Kim
Physics-Based Vehicle Simulation Using PD Servo, Appl. Sci. 2019, 9(22), 4949 | |
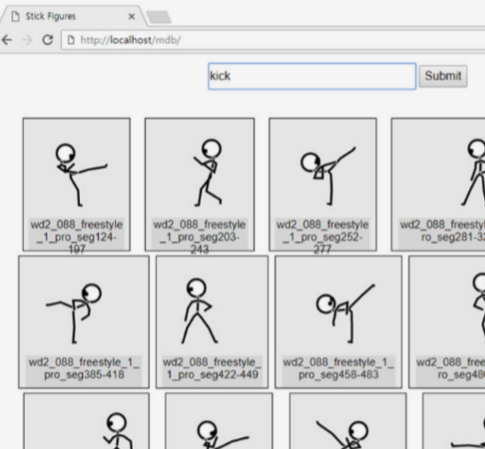 |
Myung Geol Choi, Taesoo Kwon, Motion rank: applying page rank to motion data search, T. Vis Comput (2019) 35: 289. | |
 |
Jaepyung Hwang, Jongmin Kim, Il Hong Suh and Taesoo Kwon, Real-time Locomotion Controller using an Inverted-Pendulum-based Abstract Model, Eurographics 2018
| |
| M. Kim, T. Kwon, and K. Kim, Can Human-Robot Interaction Promote the Same Depth of Social Information Processing as Human-Human Interaction? International Journal of Social Robotics, 10(1), 33- 42, 2018. | ||
 |
Nam Jun Cho, Sang Hyoun Lee, Taesoo Kwon, Il Hong Suh, and Hong-Seok Kim, Modeling Social Interaction Based on Joint Motion Significance The 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2018). | |
 |
Taesoo Kwon, Hoimin Kim, Yoonsang Lee, Control of an Iguana Character Using Soft-Body Simulation, IEEE Access, Volume 6 Issue 1, Dec 2018 | |
 |
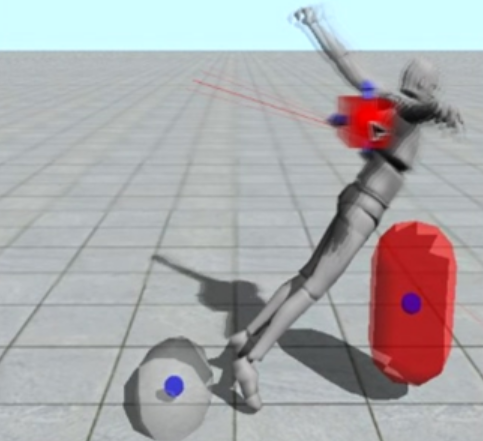
Taesoo Kwon, Jessica K. Hodgins, Momentum-mapped Inverted Pendulum Models for Controlling Dynamic Human Motions, ACM Transactions on Graphics, Volume 36 Issue 1, Feb 2017.
| |
 |
Yoonsang Lee, Taesoo Kwon Performance-Based Biped Control using a Consumer Depth Camera, Computer Graphics Forum (Eurographics 2017), Volume 36 Issue 2, May 2017.
| |
 |
Yun-hyeong Kim, Taesoo Kwon, Daeun Song, Young J. Kim, Full-body Animation of Human Locomotion in Reduced Gravity using Physics-based Control, IEEE Computer Graphics and Applications, Volume 37, Issue 6, 2017,
| |
 |
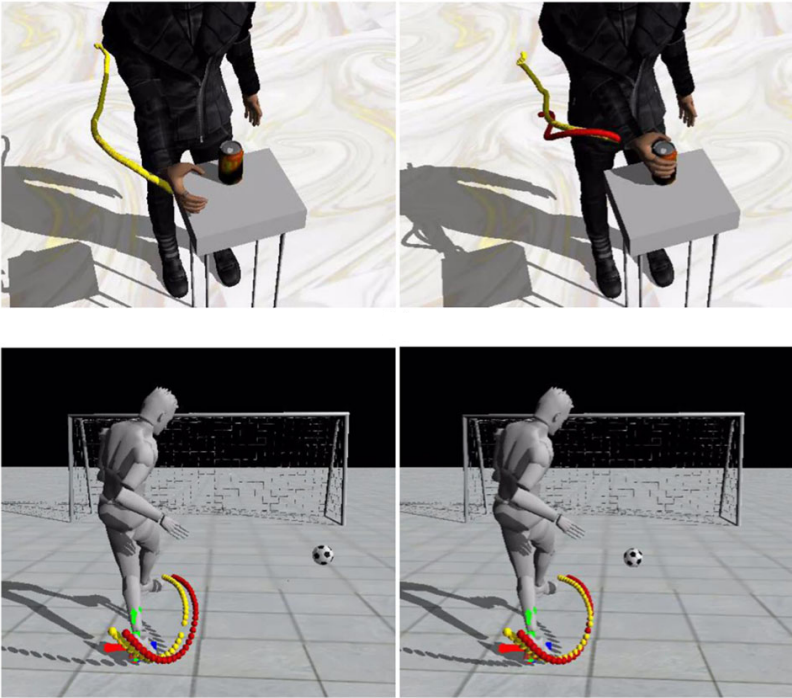
Jaepyung Hwang, Kwanguk Kim, Il Hong Suh, Taesoo Kwon, Performance-based Animation using Constraints for Virtual Object Manipulation, IEEE Computer Graphics and Applications, Volume 37, Issue 4, 2017.
| |
 |
Taeki Lee, Daeun Kang, Taesoo Kwon, Motion Normalization Method based on an Inverted Pendulum Model for Clustering, The Visual Computer (2016).
| |
 |
Jae Pyung Hwang, Myungsik Yang, Il Hong Suh, Taesoo Kwon, Real-Time Grasp Planning Based on Motion Field Graph for Human-Robot Cooperation, The 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2016). | |
| W. Sung, D. S. Hwang, B.-J. Jeong, J. Lee and T. Kwon, Electrochemical battery model and its parameter estimator for use in a battery management system of plug-in hybrid electric vehicles, International Journal of Automotive Technology, Vol. 17, No. 3, 493−508, 2016. | ||
 |
T Lee, J Park, T Kwon, Adaptive locomotion on slopes and stairs using pelvic rotation, The Visual Computer 31 (6-8), 873-881, 2015.
| |
 |
Jongmin Kim, Hwangpil Park, Jehee Lee, Taesoo Kwon, Human motion control with physically plausible foot contact models, The Visual Computer 31 (6-8), 883-891, 2015.
| |
 |
Yoonsang Lee, Moon Seok Park, Taesoo Kwon, Jehee Lee, Locomotion Control for Many-Muscle Humanoids, ACM Transactions on Graphics (SIGGRAPH ASIA 2014), Volume 33, Issue 6, NOV 2014.
| |
 |
Jae-pyung Hwang, Il Hong Suh, Taesoo Kwon, Editing and Synthesizing Two-Character Motions using a Coupled Inverted Pendulum Model, Computer Graphics Forum (Pacific Graphics 2014), Volume 33, Issue 7, OCT 2014.
| |
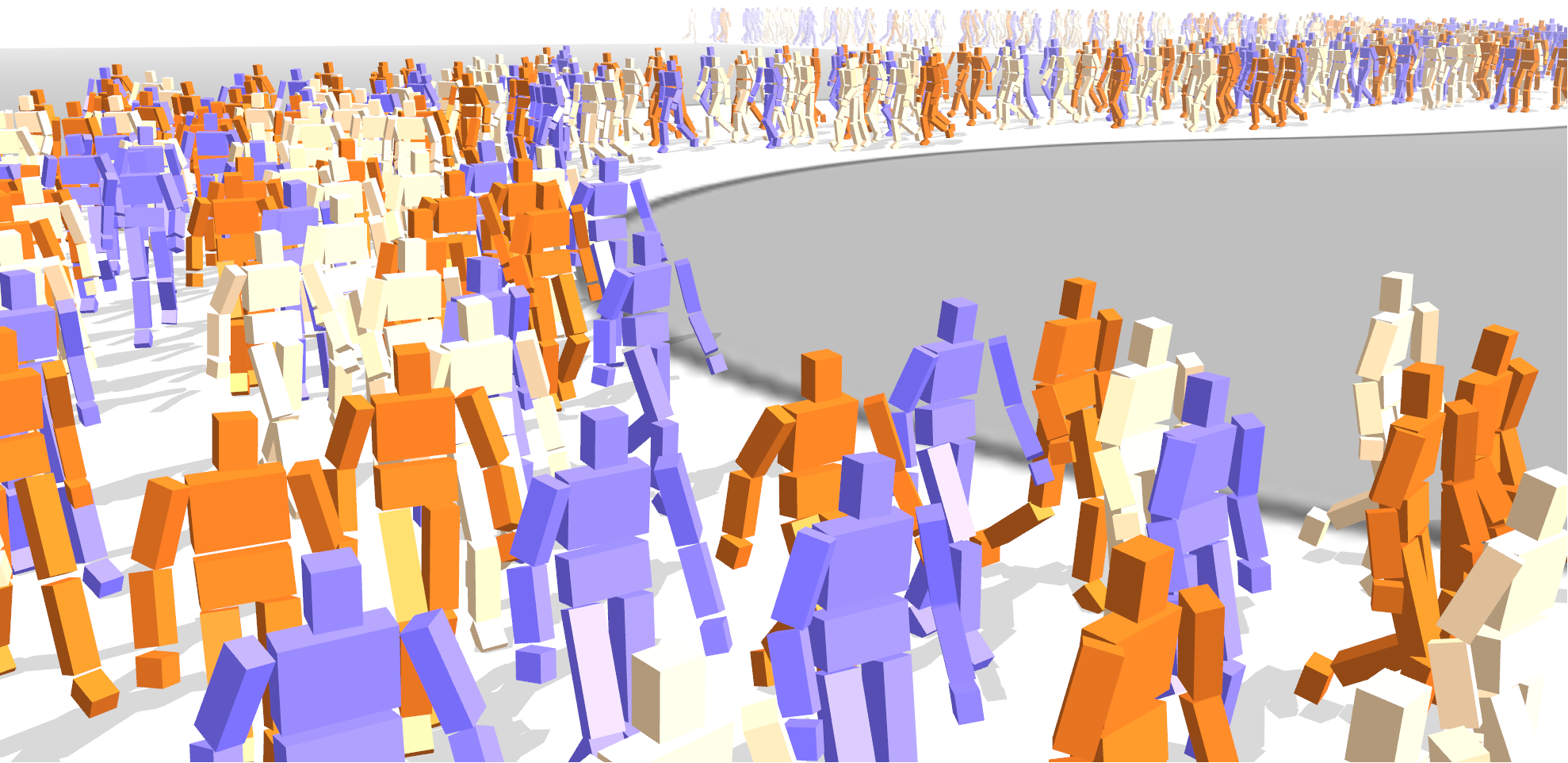 |
Jongmin Kim, Yeongho Seol, Taesoo Kwon, and Jehee Lee, Interactive Manipulation of Large-Scale Crowd Animation, ACM Transactions on Graphics (SIGGRAPH 2014), Volume 33, Issue 4.
| |
 |
Taesoo Kwon and Jessica Hodgins, Control Systems for Human Running using an Inverted Pendulum Model and a Reference Motion Capture Sequence, ACM SIGGRAPH/Eurographics Symposium on Computer Animation 2010.
| |
 |
S. Takahashi, K. Yoshida, T. Kwon, K. H. Lee, J. Lee, and S. Y. Shin, Spectral-Based Group Formation Control, Computer Graphics Forum (Proceedings of Eurographics 2009), Vol. 28, No. 2, 2009.
| |
 |
Taesoo Kwon, Kang Hoon Lee, Jehee Lee, Shigeo Takahashi, Group Motion Editing, In proc. ACM SIGGRAPH 2008.
| |
 |
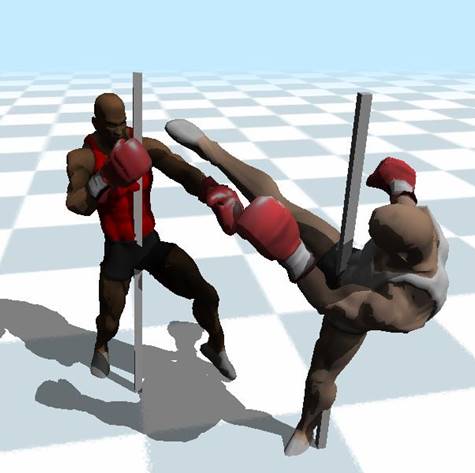
Taesoo Kwon, Young-Sang Cho, Sang Il Park, Sung Yong Shin, Two-Character Motion Analysis and Synthesis, IEEE Tran. on Vis. and Computer Graphics (TVCG), vol. 16, no. 3, pp. 707-720, May/June, 2008. |
|
 |
Taesoo Kwon, Sung Yong Shin, A Steering Model for On-Line Locomotion Synthesis, Computer Animation and Virtual Worlds, vol. 18, no. 4-5, pp. 463-472(10), September, 2007. (also presented at CASA2007.) |
|
 |
Taesoo Kwon, Sung Yong Shin, Motion Modeling for On-Line Locomotion Synthesis, ACM SIGGRAPH/Eurographics Symposium on Computer Animation 2005. |
|